
Gimbal huwa disinn ta 'rota speċjali li jista' jdur liberament f'diversi direzzjonijiet, li jippermetti li vettura jew robot jiċċaqlaq f'varjetà ta 'angoli u direzzjonijiet. Tikkonsisti f'serje ta 'roti mibnija apposta, ġeneralment b'mekkaniżmi speċjali ta' rolling fuq kull rota.

B'mod ġenerali, il-prinċipju tal-produzzjoni ta 'rota universali huwa bbażat fuq żewġ elementi ewlenin: rotazzjoni u rolling. Hawn hu prinċipju ta' fabbrikazzjoni komuni:
KOSTRUZZJONI TAR-ROTA: Rota universali ġeneralment tikkonsisti minn bobbin u rota. Il-bob huwa ffissat mal-bażi tal-bob, filwaqt li r-rota ddur liberament madwar assi ċentrali.
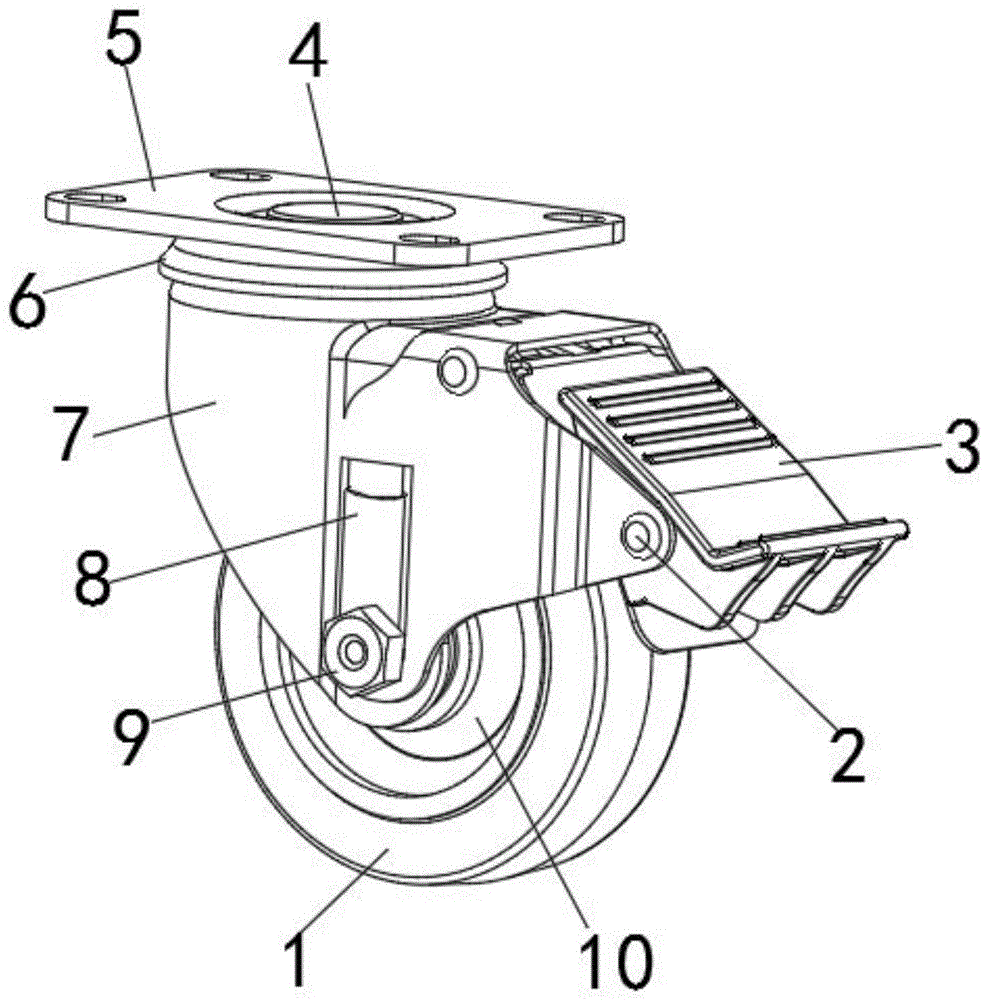
Apparat tal-irrumblar: Waveplates normalment ikollhom xi apparati speċjali tal-irrumblar bejniethom u r-roti, bħal blalen jew rombli. Dawn l-apparati jippermettu li r-roti jirromblaw f'varjetà ta 'direzzjonijiet u angoli, u b'hekk jippermettu moviment multidirezzjonali.
Hekk kif ix-xaft taċ-ċentru jdur, il-mekkaniżmu tal-irrumblar tar-roti awżiljarji jippermettilhom iduru liberament waqt li jduru mingħajr xkiel. Billi tikkontrolla l-veloċità u d-direzzjoni tar-rotazzjoni ta 'kull rota awżiljarja, jista' jiġi realizzat moviment ta 'vettura jew robot f'direzzjonijiet differenti.
B'mod ġenerali, ir-roti universali huma magħmula bil-kapaċità li jiċċaqalqu f'direzzjonijiet multipli billi jgħaqqdu r-roti awżiljarji ma 'xaft ċentrali u jutilizzaw mekkaniżmu ta' rolling speċjali u mekkaniżmu ta 'rotazzjoni li jippermetti li r-roti awżiljarji jirromblaw u jduru liberament f'diversi direzzjonijiet. Dan jippermetti li l-vettura jew ir-robot iduru u jiċċaqilqu liberament fi spazju żgħir, u jtejjeb il-manuvrabbiltà u l-flessibilità tiegħu.
Ħin tal-post: Mar-12-2024