
ジンバルとは、複数の方向に自由に回転できる特殊な車輪設計で、車両やロボットを様々な角度や方向に移動させることを可能にします。ジンバルは、通常、各車輪に特殊な回転機構を備えた、特別に設計された一連の車輪で構成されています。

一般的に、ユニバーサルホイールの製造原理は、回転と転がりという2つの重要な要素に基づいています。一般的な製造原理は次のとおりです。
ホイールの構造:ユニバーサルホイールは通常、ボビンとホイールで構成されています。ボビンはボビンのベースに固定され、ホイールは中心軸を中心に自由に回転します。
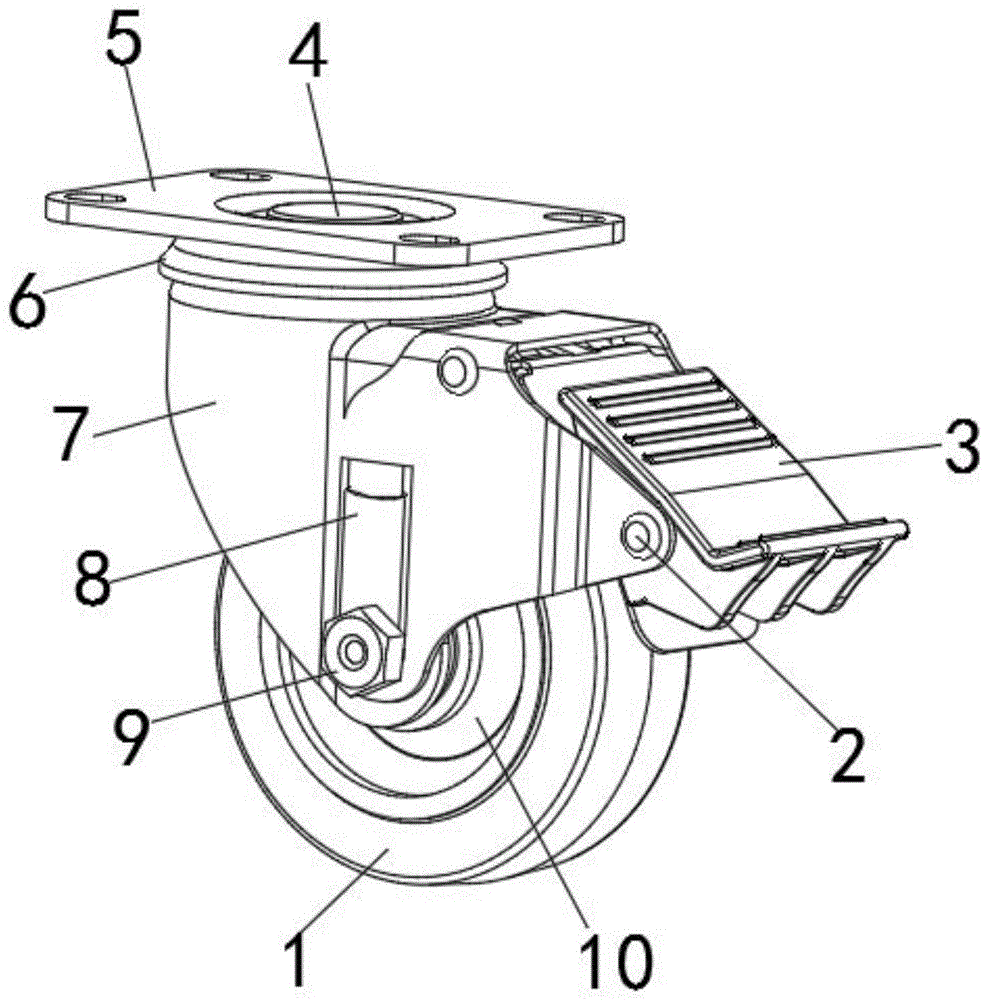
転動装置:ウェーブプレートには通常、ホイールとの間にボールやローラーなどの特殊な転動装置が取り付けられています。これらの装置により、ホイールは様々な方向や角度で転がり、多方向への移動が可能になります。
中心軸が回転すると、補助輪の転がり機構により、補助輪は支障なく転がりながら自由に回転します。各補助輪の回転速度と方向を制御することで、車両やロボットの様々な方向への移動を実現します。
ユニバーサルホイールは、補助輪を中央軸に接続し、特殊な転がり機構と回転機構を用いることで、補助輪が多方向に自由に転がり、回転することで、多方向への移動を可能にする構造となっています。これにより、車両やロボットは狭い空間でも自由に回転・移動することができ、機動性と柔軟性が向上します。
投稿日時: 2024年3月12日