
Yon gimbal se yon konsepsyon wou espesyal ki ka vire lib nan plizyè direksyon, sa ki pèmèt yon machin oswa robo deplase nan yon varyete ang ak direksyon. Li konsiste de yon seri wou espesyalman konstwi, anjeneral ak mekanis woule espesyal sou chak wou.

An jeneral, prensip pwodiksyon yon wou inivèsèl baze sou de eleman kle: wotasyon ak woule. Isit la se yon prensip fabrikasyon komen:
KONSTRUKSYON WOU: Yon wou inivèsèl anjeneral konsiste de yon bobin ak wou. Bob la fiks nan baz bob la, pandan y ap wou a wotasyon lib alantou yon aks santral.
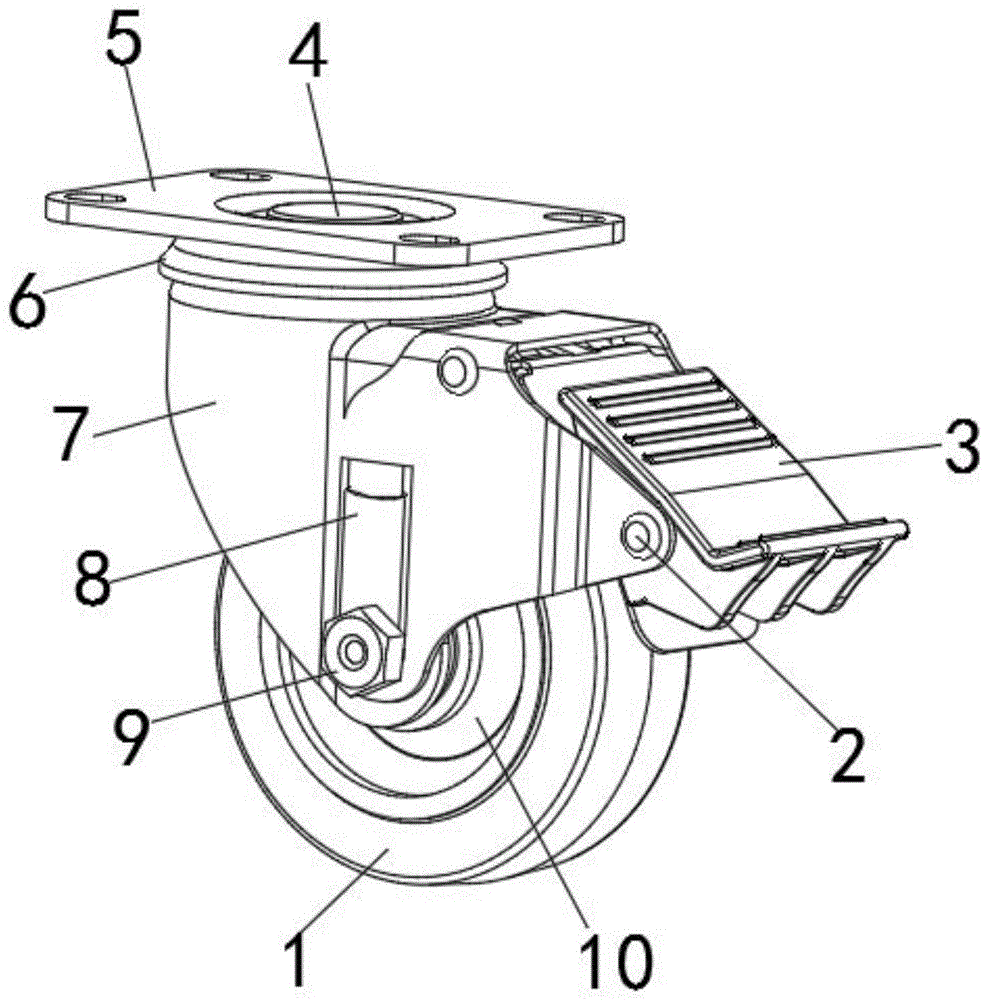
Aparèy woule: Waveplates anjeneral gen kèk aparèy woule espesyal ant yo ak wou yo, tankou voye boul oswa woulèt. Aparèy sa yo pèmèt wou yo woule nan yon varyete direksyon ak ang, kidonk pèmèt mouvman milti-direksyon.
Kòm arbr sant la wotasyon, mekanis woule nan wou yo oksilyè pèmèt yo Thorne lib pandan y ap woule san antrav. Lè w kontwole vitès ak direksyon wotasyon chak wou oksilyè, yo ka reyalize mouvman yon machin oswa robo nan diferan direksyon.
An jeneral, wou inivèsèl yo fèt ak kapasite pou avanse pou pi nan plizyè direksyon lè yo konekte wou oksilyè yo nan yon arbr santral epi itilize yon mekanis espesyal woule ak mekanis wotasyon ki pèmèt wou oksilyè yo woule ak Thorne lib nan plizyè direksyon. Sa a pèmèt veyikil la oswa robo vire ak deplase lib nan yon ti espas, amelyore manyablite li yo ak fleksibilite.
Tan poste: Mar-12-2024