
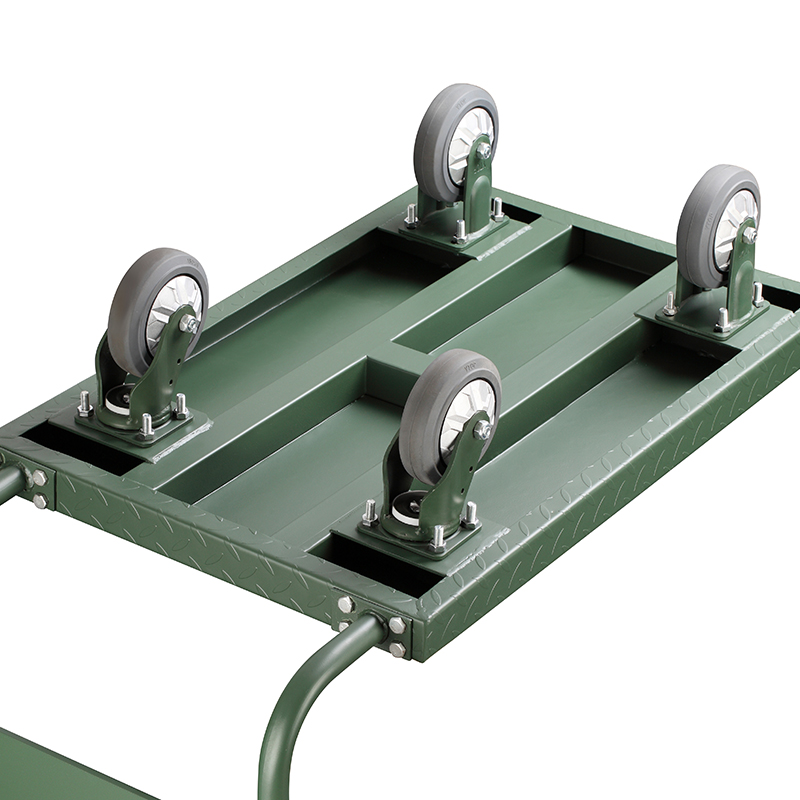
हाथगाड़ी के बार-बार उपयोग से पता चलता है कि वर्तमान हाथगाड़ी की बनावट कुछ इस प्रकार है: आगे की ओर दो दिशात्मक पहिये हैं और पीछे की ओर दो सार्वभौमिक पहिये हैं। चार सार्वभौमिक या चार दिशात्मक पहियों का उपयोग क्यों नहीं किया जाता?

सबसे पहले, चार दिशात्मक पहियों के साथ तो बिल्कुल नहीं, सार्वभौमिक पहिए की सहायता के बिना, दिशात्मक पहिए केवल एक ही दिशा में आगे बढ़ सकते हैं, जब तक कि आप केवल सीधी रेखा में ही न चलें, या फिर सार्वभौमिक पहिए के साथ ईमानदार रहना बेहतर है? तो फिर चार का उपयोग क्यों नहीं किया जाए? इसके मुख्य कारण निम्नलिखित हैं:
1. किफायती: चार पहियों वाली ट्रॉली की तुलना में दो पहियों वाली ट्रॉली निर्माण लागत में अधिक सस्ती होती है। चार पहियों वाली ट्रॉलियों में अधिक पुर्जे और जटिल यांत्रिक संरचनाएं लगती हैं, जिससे निर्माण और रखरखाव लागत बढ़ जाती है। वहीं, दो पहियों वाली ट्रॉली का सरल डिज़ाइन पुर्जों की संख्या और जटिलता को कम करता है, इसलिए यह अधिक किफायती है।
2. स्थान का बेहतर उपयोग: चार पहियों वाली ट्रॉली की तुलना में दो पहियों वाली ट्रॉली स्थान के उपयोग में अधिक लचीली होती है। चार पहियों वाली कार्ट के अतिरिक्त दो पहियों के लिए अधिक मोड़ने की त्रिज्या और स्थान की आवश्यकता होती है, जो तंग जगहों या भीड़भाड़ वाले गलियारों के लिए उपयुक्त नहीं हो सकता है। दूसरी ओर, दो पहियों वाली कार्ट को तंग जगहों में आसानी से चलाया जा सकता है और बेहतर गतिशीलता प्रदान करती है।
3. सुगम संचालन और स्थिरता: दो पहियों वाली ट्रॉलियों में सुगम संचालन और स्थिरता के मामले में भी फायदे हैं। केवल दो पहियों के साथ, स्ट्रॉलर की दिशा और मोड़ को नियंत्रित करना आसान होता है। चार पहियों वाली कार्ट में अतिरिक्त दो पहिए मोड़ते समय अस्थिरता पैदा कर सकते हैं, खासकर तेज गति पर या ऊबड़-खाबड़ जमीन पर। दो पहियों वाली कार्ट अपेक्षाकृत अधिक स्थिर होती हैं, जिससे सामान को संतुलित रखने और सुरक्षित रूप से परिवहन करने में मदद मिलती है।
पोस्ट करने का समय: 04 मार्च 2024